
Ζήστε την εμπειρία της εκτόξευσης, της πτήσης και της προσγείωσης του δορυφόρου μας με τον πύραυλο της CANSAT μέσα από ένα περιβάλλον εικονικής πραγματικότητας.
Διαγωνισμός Cansat
Φέτος η ομάδα μας συμμετέχει στο CanSat in Greece, έναν πανελλήνιο διαγωνισμό διαστημικής που υλοποιείται από τη SPIN – Space Innovation με το συντονισμό του ESERO GREECE. Μαζί με άλλες 13 ομάδες από όλη την Ελλάδα θα βρεθούμε στις 20-23 Απριλίου στην Αθήνα για την εκτόξευση του δορυφόρου μας. Ο δορυφόρος θα εκτοξευθεί σε υψόμετρο 1 χιλιομέτρου, ενσωματωμένος σε έναν πύραυλο που κατασκευάστηκε από τη SPIN και στη συνέχεια θα αποδεσμευτεί στην ατμόσφαιρα. Ο δορυφόρος θα προσγειωθεί με τη χρήση αλεξίπτωτου εκτελώντας δύο αποστολές, την πρωτεύουσα που ορίζεται από τo CanSat και την επιστημονική αποστολή την οποία έχουμε σχεδιάσει εμείς.
Μέγας χορηγός Chris Siakos – VP, Fellow at Palo Alto Networks
Πολύτιμος αρωγός στην προσπάθεια μας είναι ο ομογενής επιχειρηματίας κ. Chris Siakos – VP, Fellow at Palo Alto Networks, ο οποίος καλύπτει τα έξοδα για την αγορά εξοπλισμού, καθώς και για την μετακίνηση και διαμονή της ομάδας μας στην Αθήνα τις ημέρες που θα πραγματοποιηθεί η εκτόξευση του δορυφόρου. Ο κ. Chris Siakos, με καταγωγή από την Φλώρινα, είναι ένας επιτυχημένος Αυστραλός επιχειρηματίας στον τομέα της πληροφορικής και της καινοτομίας. Προσφέρθηκε αμέσως να μας βοηθήσει οικονομικά και να δώσει πολύτιμες συμβουλές για την υλοποίηση της ιδέας μας με βάση την πολύχρονη εμπειρία του πάνω σε εγχειρήματα υψηλής τεχνολογίας. Τον ευχαριστούμε θερμά!
Πρωτεύουσα Αποστολή
Μετά την αποδέσμευση και κατά την κάθοδο, ο δορυφόρος μας θα πρέπει να παίρνει μετρήσεις των ακόλουθων παραμέτρων, να τις αποθηκεύει και παράλληλα να εκπέμπει τα δεδομένα με τη μορφή τηλεμετρίας τουλάχιστον ανά δευτερόλεπτο στον επίγειο σταθμό. Επιπρόσθετα το CanSat θα πρέπει να διαθέτει σύστημα ηχητικής ανάκτησης (buzzer) ως βοηθητικό ανάκτησης του δορυφόρου μετά την προσγείωση.
Απαραίτητες Μετρήσεις
- Ατμοσφαιρική Θερμοκρασία
- Ατμοσφαιρική Πίεση
- Γεωγραφικές συντεταγμένες
Απαραίτητα Συστήματα
- Τηλεμετρίας (συχνότητα πακέτων > 1Ηz)
- Αποθήκευσης μετρήσεων σε SD (στο cansat)
- Aισθητήρων (θερμοκρασίας, πίεσης)
- Hχητικής ανάκτησης (buzzer)
Τέλος πρέπει να αναλύσουμε τα δεδομένα τα οποία αποκτήθηκαν (π.χ. να υπολογίσουμε το υψόμετρο) και να τα παρουσιάσουμε σε γραφήματα (π.χ. υψόμετρο προς χρόνο και θερμοκρασία προς υψόμετρο).
Επιστημονική Αποστολή
Η δευτερεύουσα αποστολή που σχεδιάσαμε έχει ως στόχο την αναπαράσταση της πορείας και της κλίσης του δορυφόρου μας, καθώς και των δυνάμεων που ασκούνται σε αυτόν σε πραγματικό χρόνο μέσα από ένα περιβάλλον εικονικής πραγματικότητας WebVR, το οποίο θα είναι ελεύθερα διαθέσιμο για υπολογιστές, φορητές συσκευές και συστήματα VR.
Σύστημα
Ο δορυφόρος μας χρησιμοποιεί αισθητήρες IMU (Inertial Measurement Unit), BMP (Barometric Pressure), καθώς και αισθητήρες FSR (Force Sensing Resistors). Τα δεδομένα που αντλούνται από τους αισθητήρες αυτούς, μαζί με το υψόμετρο το οποίο μας το παρέχει ο αισθητήρας βαρομετρικής πίεσης BMP, και τις γεωγραφικές συντεταγμένες θα στέλνονται στον σταθμό βάσης μέσα από το σύστημα τηλεμετρίας (LoRa Trasnceivers). Εκεί, οι μετρήσεις ύστερα από επεξεργασία θα αποθηκεύονται σε μία τοπική βάση δεδομένων καθώς και σε μία διαδικτυακή (Firebase).



Εξαρτήματα δορυφόρου
| Arduino Nano |  | Κεντρική μονάδα του συστήματος. |
| BMP280 |  | Αισθητήρας βαρομετρικής πίεσης, θερμοκρασίας και υψομέτρου. |
| MPU-9250 |  | Γυροσκόπιο, επιταχυνσιόμετρο και μαγνητόμετρο |
| FSR |  | Αισθητήρας αντίστασης δύναμης. |
| GPS Module |  | Παροχή γεωγραφικών συντεταγμένων |
Adafruit RFM96W LoRa |  | Μεταφορά δεδομένων |
SD Card Reader |  | Αποθήκευση δεδομένων |
Buzzer |  | Ηχητική ανάκτηση |
Battery x2 |  | Πηγή ηλεκτρικού ρεύματος |
Εφαρμογή WebVR
Δημιουργήσαμε μια webVR εφαρμογή για υπολογιστές, κινητές συσκευές και συστήματα VR χρησιμοποιώντας το open framework AFRAME JS. Η εφαρμογή θα παίρνει σε πραγματικό χρόνο τα δεδομένα από την online βάση δεδομένων και θα αναπαριστά την πορεία, την κλίση, την επιτάχυνση, τις αναταράξεις και τις δυνάμεις που ασκούνται στον δορυφόρο μας.
Αντί να έχουμε βίντεο 360 που απαιτεί πολύ bandwidth για να σταλεί από τον δορυφόρο, θα δημιουργήσουμε έναν εικονικό κόσμο που θα στηρίζεται σε υπηρεσίες που είναι διαθέσιμες στο διαδίκτυο (όπως το map tiler cloud και η βιβλιοθήκη Cesium JS) και θα αξιοποιήσουμε τα δεδομένα από τις μονάδες IMU του δορυφόρου για να παρέχουμε μια ρεαλιστική εμπειρία.
Το περιβάλλον WebVR θα είναι διαθέσιμο με ελεύθερη πρόσβαση από την ιστοσελίδα μας, προσφέροντας έτσι μια open-source περιήγηση πάνω από τη Γη. Μέσα από την οπτική του δορυφόρου σε πτήση, ο χρήστης αποκτά μια εκπαιδευτική αλλά συγχρόνως ψυχαγωγική εμπειρία, ενώ μπορεί να χρησιμοποιήσει τις πληροφορίες που παρουσιάζονται για ερευνητικούς σκοπούς.


Μπορείτε να δείτε αναλυτικά τα συστήματα webVR που έχουμε αναπτύξει εδώ.
Μηχανολογικό / Κατασκευαστικό σχέδιο
Για την υλοποίηση του μηχανολογικού σχεδίου του CanSat μας αξιοποιήσαμε το πρόγραμμα Fusion 360 της Autodesk. Ο δορυφόρος μας αποτελείται από δύο κομμάτια τα οποία προκύπτουν αν διχοτομήσουμε κατακόρυφα τον αρχικό κύλινδρο διαστάσεων 115x66mm και ενώνονται μεταξύ τους με τέσσερις βίδες και παξιμάδια, τοποθετημένα οριζοντίως. Στο πάνω μέρος του κυλίνδρου έχουμε ανοίξει δύο τρύπες που εξυπηρετούν στην επαφή της κεραίας του GPS με το περιβάλλον και η μία κεντρική στην οποία θα εφαρμόζει βιδωτός κρίκος για το αλεξίπτωτο. Έχει σχεδιαστεί επίσης ειδικό διαμέρισμα για την τοποθέτηση της κεραίας του GPS. Ακόμα, στο αριστερό κάτω μέρος υπάρχει μια τρύπα ώστε να έχουμε πρόσβαση στον διακόπτη του συστήματός μας, ο οποίος θα είναι τοποθετημένος στο τελευταίο κάτω pcb. Σε πλαϊνά σημεία του δορυφόρου υπάρχουν οριζόντια ανοίγματα ώστε να εισέρχεται περιβαλλοντικός αέρας – με σκοπό να αποφευχθούν μεγάλες αποκλίσεις στις μετρήσεις που θα παίρνουμε από τον αισθητήρα θερμοκρασίας.

Τα βασικά στοιχεία του δορυφόρου μας όπως ο μικροελεγκτής, οι αισθητήρες και ο πομπός είναι τοποθετημένα πάνω σε τέσσερις πλακέτες pcb που σχεδιάζουμε. Οι πλακέτες αυτές τοποθετούνται σε ειδικά διαμορφωμένες για τις διαστάσεις τους θήκες. Συγκεκριμένα, σχεδιάσαμε τέσσερις εσοχές σε κάθε ένα κομμάτι του δορυφόρου οι οποίες όταν τον κλείσουμε θα λειτουργούν ως ράφια για τις πλακέτες. Επίσης, οι μπαταρίες είναι τοποθετημένες στο κάτω μέρος του δορυφόρου με μικρές εσοχές ώστε να μένουν σταθερές.


Επιπλέον, ο αισθητήρας FSR που θα χρησιμοποιήσουμε είναι τοποθετημένος εξωτερικά, στο κάτω μέρος του δορυφόρου. Για την προστασία του από τυχόν βλάβες, καθώς και για αποδοτικότερα αποτελέσματα μετρήσεων, ο αισθητήρας καλύπτεται από ένα επίπεδο κύκλο. Το εξάρτημα αυτό δεν είναι προσκολλημένο στο κάτω μέρος του περιβλήματος, αλλά έχει τη δυνατότητα να ανεβαίνει και να κατεβαίνει, πιέζοντας έτσι όλη την επιφάνεια του αισθητήρα μας. Με αυτόν τον τρόπο θα λαμβάνουμε καλύτερες και σίγουρες μετρήσεις κατά την προσγείωση του δορυφόρου μας.




Για το πρωτότυπο εξωτερικό κέλυφος του δορυφόρου μας αξιοποιήσαμε τους 3D εκτυπωτές που μας παρέχει το Πειραματικό Δημοτικό Σχολείο καθώς και αυτούς που έχουν τα μέλη της ομάδας μας στα σπίτια τους. Έχοντας ήδη πειραματιστεί αρκετά με υλικό PLA, εκτυπώσαμε με αυτό τα πρωτότυπα μας ενώ για την τελική κατασκευή χρησιμοποιήσαμε το ανθεκτικότερο ABS filament.




Κατασκευή πλακετών PCB
Η ομάδα αποφάσισε επίσης, να κατασκευάσει τα δικά της PCB μέσω της πλατφόρμας EasyEDA. Για να χωρέσουμε όλα τα απαραίτητα εξαρτήματα, θα τα χωρίσουμε σε τέσσερα ξεχωριστά κυκλικά PCB διαμέτρου 60mm.




Οι πλακέτες ήταν ευγενής χορηγία της εταιρείας Link2Dot.
Ηλεκτρολογικό σχέδιο
Το παρακάτω ηλεκτρολογικό σχέδιο δημιουργήθηκε μέσω του online προγράμματος EasyEDA. Τα εξαρτήματα που χρησιμοποιούνται στην πρωτεύουσα αποστολή είναι ένα Arduino Nano, το οποίο θα είναι ο μικροελεγκτής μας, ένα NEO-M8N GPS, ένας BMP280, που θα μετρά την θερμοκρασία και την ατμοσφαιρική πίεση του Cansat, καθώς και έναν SD Card Reader, που θα αποθηκεύει τοπικά τα δεδομένα που πάρθηκαν. Όσον αφορά τη δευτερεύουσα αποστολή, έχουμε επιλέξει τον MPU-9250, ο οποίος είναι ταυτόχρονα γυροσκόπιο, επιταχυνσιόμετρο και μαγνητόμετρο, και έναν FSR για την καταγραφή των ασκούμενων δυνάμεων στον δορυφόρο. Όλα τα ηλεκτρονικά εξαρτήματα θα εφαρμόζουν σε PCBs τα οποία θα σχεδιάσουμε εμείς.

Ο πομπός ραδιοσυχνοτήτων που επιλέξαμε είναι ο RFM96W LoRa Transceiver της Adafruit, ο οποίος θα είναι ο ίδιος και στο Cansat μας και στη βάση και θα εκπέμπει στη συχνότητα των 433MHz, αφού αποτελεί συχνότητα που μπορεί να χρησιμοποιηθεί χωρίς άδεια στην Ευρώπη (ISM Band). Αναμένουμε να λαμβάνουμε δεδομένα από το Cansat κάθε 1 δευτερόλεπτο (συχνότητα 1Hz). Ο μέγιστος ρυθμός μετάδοσης δεδομένων, ο οποίος προέκυψε από τις ρυθμίσεις του πομπού, είναι περίπου 5468 bps. Γνωρίζοντας ότι ένα πακέτο θα είναι περίπου 50 bytes, ο ρυθμός μετάδοσης είναι κατάλληλος για την αποστολή μας. Οι δύο πομποδέκτες θα έχουν συγκεκριμένες διευθύνσεις, οι οποίες θα στέλνονται μαζί με τα πακέτα μας, ώστε εκείνα να ταυτοποιούνται και να μην εμποδίζουν άλλες ομάδες.
Ακολουθεί πίνακας μέγιστης κατανάλωσης ισχύος:
| Ηλεκτρονικά | Ρεύμα (mA) | Τάση (V) | Ισχύς (mW) |
| Arduino (nano) | 50,000 | 5,0 | 250,00 |
| BMP280 | 0,003 | 3,3 | 0,01 |
| NEO-M8N | 35,000 | 3,3 | 115,50 |
| MPU-9250 | 3,700 | 5,0 | 18,50 |
| RFM96W | 130,000 | 3,3 | 429,00 |
| Buzzer | 30,000 | 5,0 | 150,00 |
| SD Card Reader | 80,000 | 5,0 | 400,00 |
| 328,703 | 963,00891 |
Σύστημα ανάκτησης
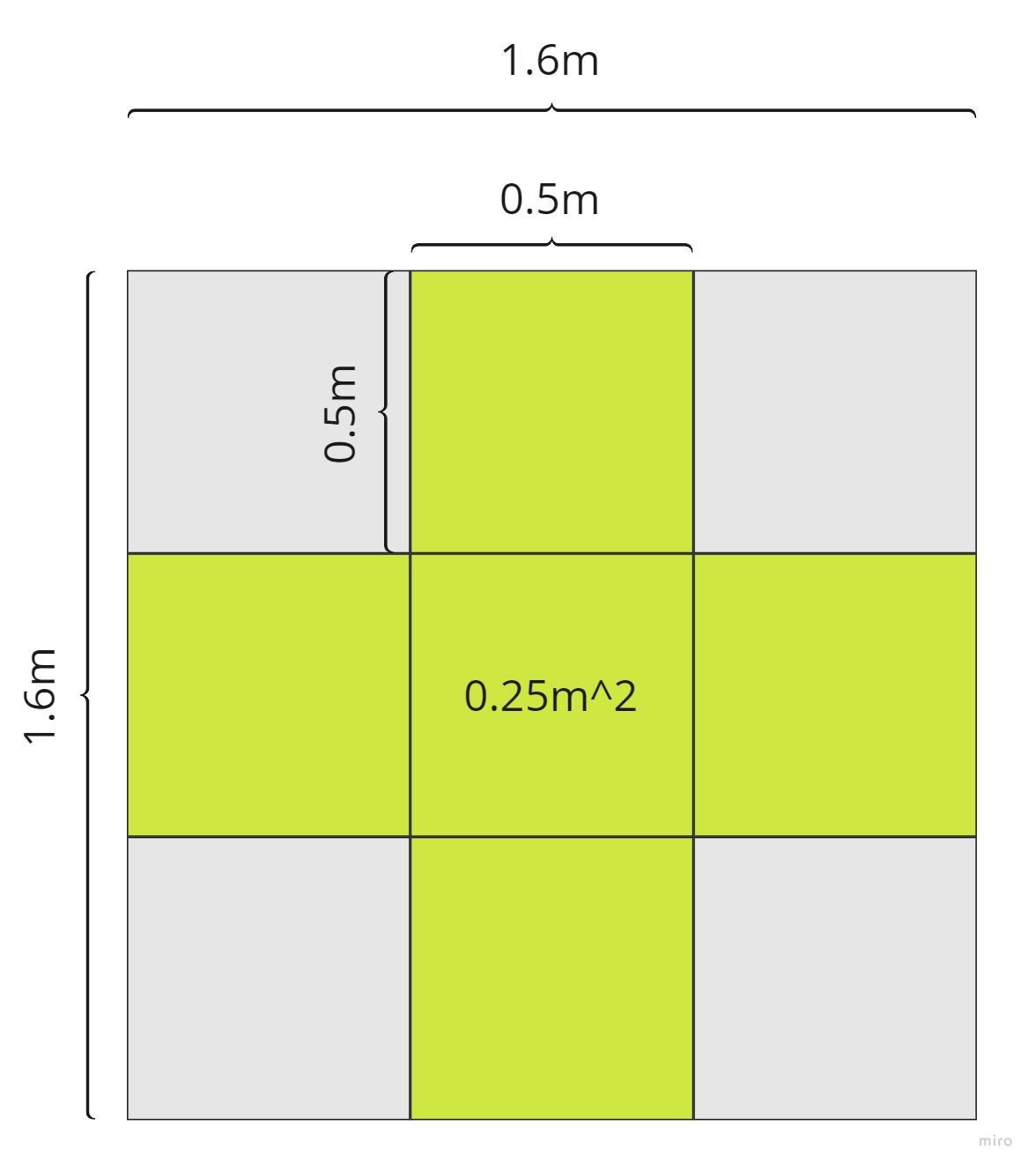
Για την κατασκευή του συστήματος ανάκτησης χρησιμοποιήσουμε ένα cross parasheet από Ripstop Nylon 10D καθώς έχεις τις ιδιότητες του μικρού βάρους, της μεγάλης αντοχής στην αντίσταση του αέρα και την διείσδυση από το νερό. Για την ασφαλή και ομαλή προσγείωση του CanSat θα επιδιώξουμε η ταχύτητα καθόδου του να κυμαίνεται στα 6 m/s. Έτσι, μέσω του τύπου:

Όπου: Α το εμβαδόν της επιφάνειας του αλεξίπτωτου, ρ=1,12kg/m^3 (η πυκνότητα του αέρα), υ=6m/s (η ταχύτητα καθόδου), και Cd=0.75 (η σταθερά οπισθέλκουσας του αλεξίπτωτου η οποία εξαρτάται από το σχήμα του), βρήκαμε πως το αλεξίπτωτο πρέπει να έχει συνολικό εμβαδόν περίπου 2.5m2 που σημαίνει πως κάθε ένα από τα πέντε τετράγωνα του parasheet θα έχει πλευρά περίπου 0,5m και εμβαδόν 0,25m2. Επομένως το εμβαδόν του σταυρού θα είναι 1.25m2.
Τέλος, ο εκτιμώμενος χρόνος πτήσης υπολογίζεται από τον τύπο V=Δx/Δt άρα Δt=Δx/V ⇒ Δt=1km/6m/s ⇒ Δx≃ 167s ≃ 2min 47s.


Δεδομένα και αξιοποίηση
Τα βασικά δεδομένα που θα καταγράφονται από τον δορυφόρο μας θα είναι:
- Οι ακριβείς συντεταγμένες του δορυφόρου (μονάδα GPS)
- Η θερμοκρασία (αισθητήρας BMP)
- Η βαρομετρική πίεση (αισθητήρας BMP – χρησιμεύει στον υπολογισμό του υψομέτρου)
- Μετρήσεις γωνιακής ταχύτητας, επιτάχυνσης και μαγνητικού πεδίου (αισθητήρας MPU – απαραίτητες τιμές για την τοποθέτηση του δορυφόρου στο 3D μοντέλο του περιβάλλοντος WebVR)
- Η τιμή της αντίστασης του αέρα που ασκείται στον δορυφόρο και τη δύναμη που ασκείται από την επαφή με το έδαφος κατά την προσγείωση (αισθητήρας FSR)
Όλα τα δεδομένα θα αποστέλλονται στον σταθμό βάσης ο οποίος με δεδομένη την αρχική θέση εκτόξευσης του δορυφόρου θα μπορεί να υπολογίζει την πορεία του. Τα δεδομένα θα στέλνονται από τον σταθμό βάσης σε μια online βάση δεδομένων και θα αξιοποιούνται από το σύστημα WebVR που θα αναπτύξουμε. Όλα τα δεδομένα θα παραμείνουν ελεύθερα διαθέσιμα από την ιστοσελίδα μας και από το αποθετήριο μας στο Github και θεωρούμε ότι θα είναι ιδιαίτερα χρήσιμα σε σχεδιαστές και μηχανικούς από άλλες ομάδες που θέλουν να συμμετέχουν σε αυτόν τον διαγωνισμό.
Επιπλέον, με βάση τα παραπάνω δεδομένα θα δημιουργήσουμε:
Γραφήματα πρωτεύουσας αποστολής
Αξιοποιώντας τα δεδομένα που λαμβάνουμε από τον αισθητήρα βαρομετρικής πίεσης (BMP280) για τη πρωτεύουσα αποστολή, θα δημιουργούμε γράφημα:
- Θερμοκρασίας-Πίεσης σε συνάρτηση με το Υψόμετρο:
Από το γράφημα αυτό περιμένουμε να δούμε μείωση της θερμοκρασίας και της πίεσης καθώς το υψόμετρο αυξάνεται και αντίστοιχα αύξηση τους καθώς το υψόμετρο μειώνεται.
Γραφήματα δευτερεύουσας αποστολής
Όσον αφορά την δευτερεύουσα αποστολή, αφού ο βασικός μας στόχος είναι η αναπαράσταση της κλίσης και της πορείας του δορυφόρου, θα καταγράφουμε τα δεδομένα μας σε τρία διαγράμματα τα οποία είναι:
- Κλίση άξονα x σε συνάρτηση με τον Χρόνο
- Κλίση άξονα y σε συνάρτηση με τον Χρόνο
- Κλίση άξονα z σε συνάρτηση με τον Χρόνο
Τα δεδομένα αυτά θα αξιοποιηθούν επίσης για τη λειτουργία του συστήματος VR.
Δείτε στιγμιότυπα από την συμμετοχή της ομάδας μας στον διαγωνισμό CANSAT Greece 2023 εδώ